FAST-FIRE is a research team within the FAST-LAB at Zhejiang University, dedicated to advancing the field of robotics. Our primary focus lies in robotic swarms and autonomous trajectory
planning for robots. We are passionate about exploring innovative robotic concepts and are committed to pushing the boundaries of robotics to unlock extraordinary capabilities.
Content
Air-Ground Cooperation without Global Information: RoFly and CubeTrack Cooperation with CREPES and CoNi-MPC
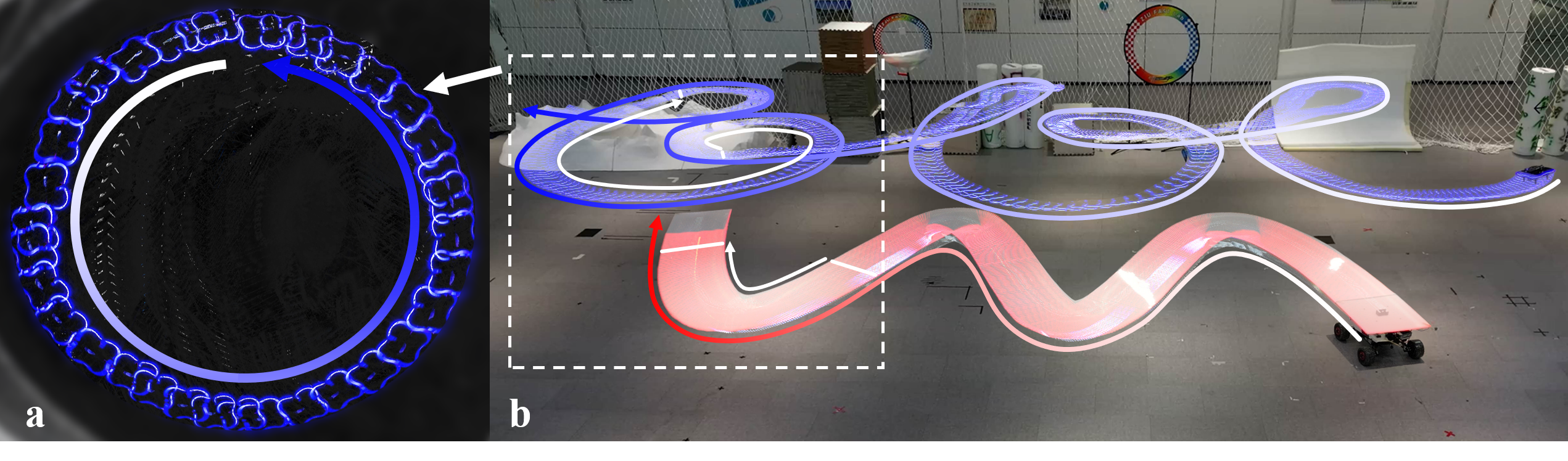
RoFly is a novel passive-wheeled Transformable Aerial-
Bipedal Vehicle (TABV) that features a pitch-torque balanced
transformable parallelogram linkage mechanism combined
with bidirectional rotor control, achieving high energy ef-
ficiency in terrestrial mode. The work includes a bimodal
dynamic model of the proposed TABV with corresponding differential flatness to simplify trajectory planning. A Hybrid
Nonlinear Model Predictive Control (HNMPC) controller is
developed to achieve accurate trajectory tracking in both
terrestrial and aerial modes, enabling seamless transitions
between them. Extensive experimental results validate the
energy efficiency and control performance of the proposed
system
CubeTrack is an innovative reconfigurable tracked robot
whose core innovation is the Geometry-Changing Track
Module (GCTM) featuring our novel Quad-slider elliptical
trammel mechanism (Qs-ETM). This mechanism enables dy-
namic posture adjustment of the flipper arms along optimized
elliptical trajectories to overcome various obstacles: when
climbing vertical barriers up to 0.33m high, the flippers rotate
downward to form a stable triangular configuration; when
crossing gaps up to 0.6m wide, they extend bidirectionally
to bridge the chassis; and during stair descent, they ensure
smooth weight transition. The modular architecture integrates
a central chassis with two GCTMs containing direct-drive
motors for precise control, allowing effective operation in
both compact triangular and flat configurations according to
terrain demands.
Supported by our self-developed trajectory planning al-
gorithms and kinematic modeling framework based on in-
stantaneous centers of rotation, CubeTrack achieves fully
autonomous navigation in complex multi-layer architectural
environments. Our proprietary motion planning system en-
ables the robot to generate optimal trajectories in real-time
while accounting for nonholonomic constraints and terrain
variations. Experimental results demonstrate that our method
empowers CubeTrack to successfully navigate challenging
non-Manhattan environments featuring spiral staircases, nar-
row passages, and multi-level structures, demonstrating sig-
nificant advantages of our innovative approach.
For an efficient multi-robot system, mutual relative lo-
calization is the key to accomplishing tasks cooperatively.
Stable, accurate and fast relative pose estimation between
robots can significantly improve the quality of collaboration.
CREPES is a collaborative relative pose estimation system
for multi-robot systems, which can provide accurate and real-
time 6-DoF relative pose estimation between robots. The
system is designed requiring no external equipment or prior
knowledge of the environment. Each robot is equipped with
a low-cost MEMS IMU, a UWB module, a camera with
a fisheye lens and IR LEDs for mutual identification and
bearing measurement. The system fuses the measurements
from these sensors through an Error State Kalman Filter
(ESKF) to estimate the relative poses between robots. The
system can run at a frequency of 100 Hz with centimeter-
level translation accuracy and degree-level rotation accuracy
in real-time.
CoNi-MPC presents a novel solution for UAV control
in cooperative multi-robot systems, which can be used in
various scenarios such as leader-following, landing on a
moving base, or specific relative motion with a target. Unlike
classical methods that tackle UAV control in the world frame,
we directly control the UAV in the target coordinate frame,
without making motion assumptions about the target. In
detail, we formulate a non-linear model predictive controller
of a UAV, referred to as the agent, within a non-inertial frame
(i.e., the target frame). The system requires the relative states
(pose and velocity), the angular velocity and the accelerations
of the target, which can be obtained by relative localization
methods and ubiquitous MEMS IMU sensors, respectively.
This framework eliminates dependencies that are vital in
classical solutions, such as accurate state estimation for
both the agent and target, prior knowledge of the target
motion model, and continuous trajectory re-planning for
some complex tasks.
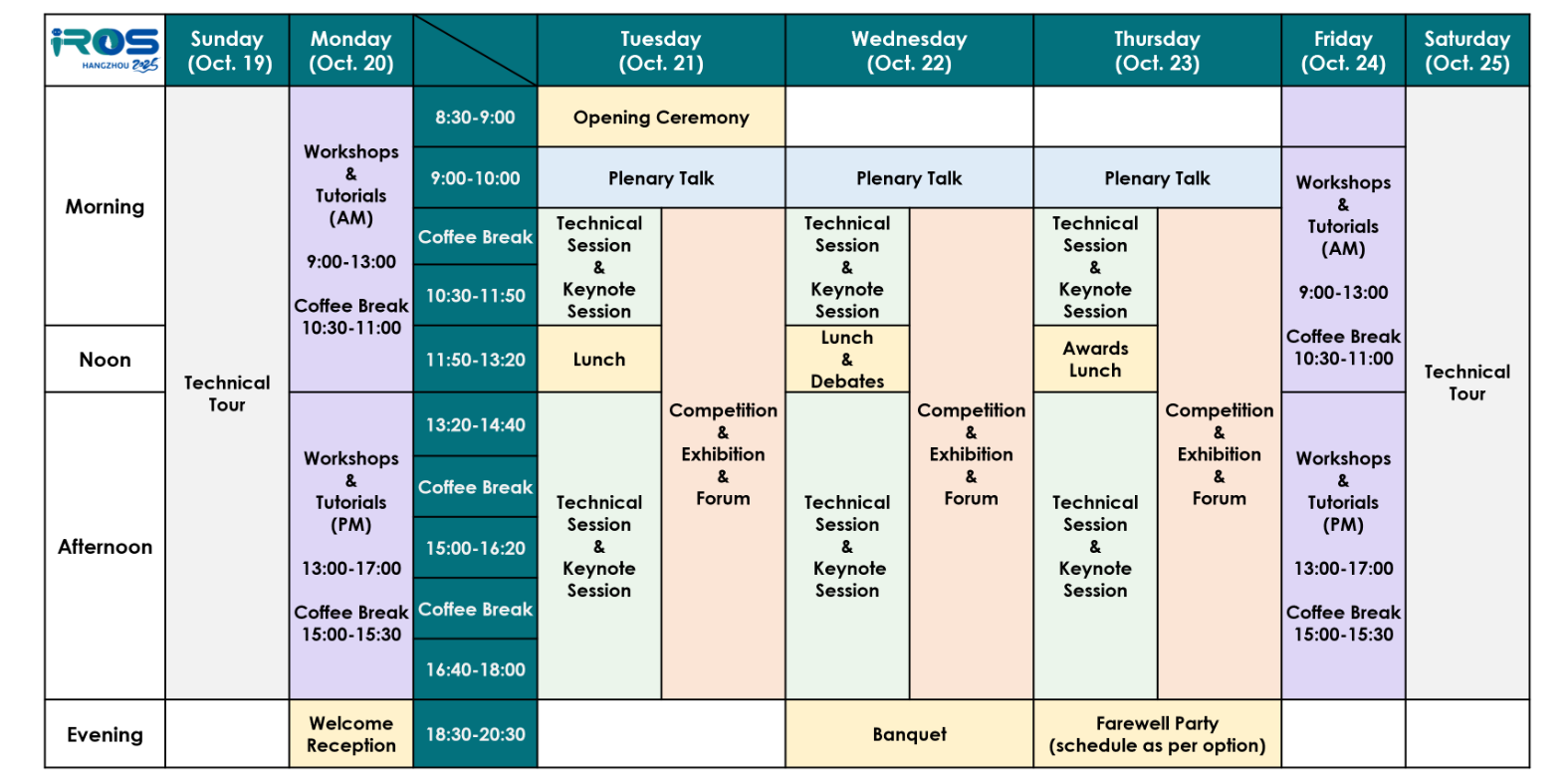
Schedule
Date: October 21, 2025 (Tuesday)
Time: 13:00 – 17:00 hrs
Venue: Exhibition Hall 3B, Hangzhou International Expo
Center, Hangzhou, China
Time Table:
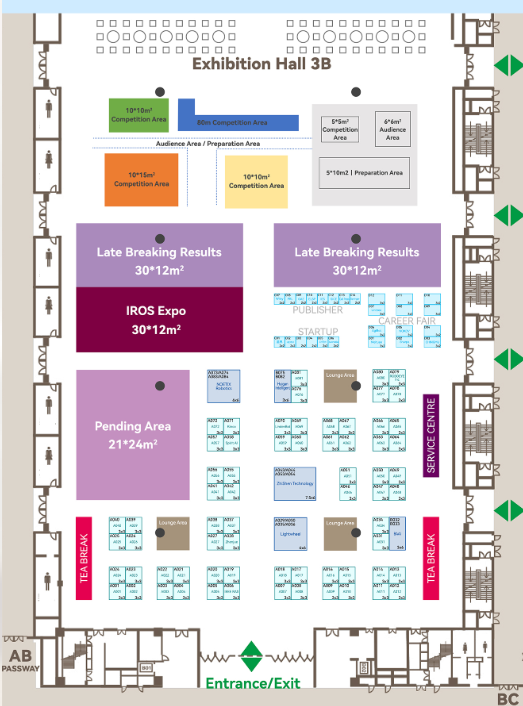
Exhibition Venue Map:
Contact
Address: No.819, Xisaishan Road, Huzhou City, Zhejiang, 313002