摘要
CubeTrack(酷行)变形履带机器人 包括履带式移动车体和轻巧作业机械臂两部分。
履带式移动车体采用变形履带结构,其特有的三角形变形结构,可在维持较小体积的状态下,顺利通过狭窄区域以及障碍路面,包括沙石瓦砾、50cm沟壑、40°斜坡、上下楼梯以及积水坑洼地面等。车体的移动速度不小于1.5m/s,可迅速地到达目的地,且左右履带为差分控制,可完成顺逆时针的原地360°旋转,保证控制的便捷性与灵活性,进一步提高了复杂环境的适应与通过能力。 作业机械臂由五自由度机械臂和单自由度机械手构成,该机械手采用柔性设计,材质柔软,具有一定的自适应性,在抓取物体时能对被抓物体形成包络。从而具有灵活的作业能力,可以进行自主开关门、移除路障、高处取样、灾后救援等操作。
作业机械臂由五自由度机械臂和单自由度机械手构成,该机械手采用柔性设计,材质柔软,具有一定的自适应性,在抓取物体时能对被抓物体形成包络。从而具有灵活的作业能力,可以进行自主开关门、移除路障、高处取样、灾后救援等操作。
变构型履带式结构
为了解决机器人在多层环境中进行自主巡检的挑战,本团队精心研发了一款具备高度地形适应能力和变形特性的履带底盘。在高效与稳定的设计理念的指导下,该底盘采用了一种由三个带轮构成的创新性可变形履带模块。其中,两个固定带轮安装在底盘上,而一个运动带轮则能够沿着两个固定带轮的中心轴进行自由旋转。经过详细的数学建模,发现运动带轮按照一个椭圆轨迹运动,而两个固定带轮则恰好分别位于这一椭圆的两个焦点。依据在极坐标中椭圆轨迹与以该椭圆短轴为半径的圆轨迹的距离差,我们巧妙地设计了一种特殊形状的凸轮(如下图1.1所示)。该凸轮装置能够使履带摆臂的长度在不同角度下自动调节,进而改变履带的构型,以极大地提升其在多变和复杂地形中的适应性。具体来说,只需控制履带摆臂的角度,便能改变履带的形状(如下图1.2所示),极大增加了履带机器人越障性能和上下楼梯的稳定性,使得机器人能够轻松跨越高达30cm的台阶,以及在标准楼梯上自由上下行走。这种先进的底盘设计不仅大大提升了机器人在复杂地形中的适应性,还成功地解决了烟草行业巡检所需的跨楼层巡检的难题。

全自主导航巡检系统
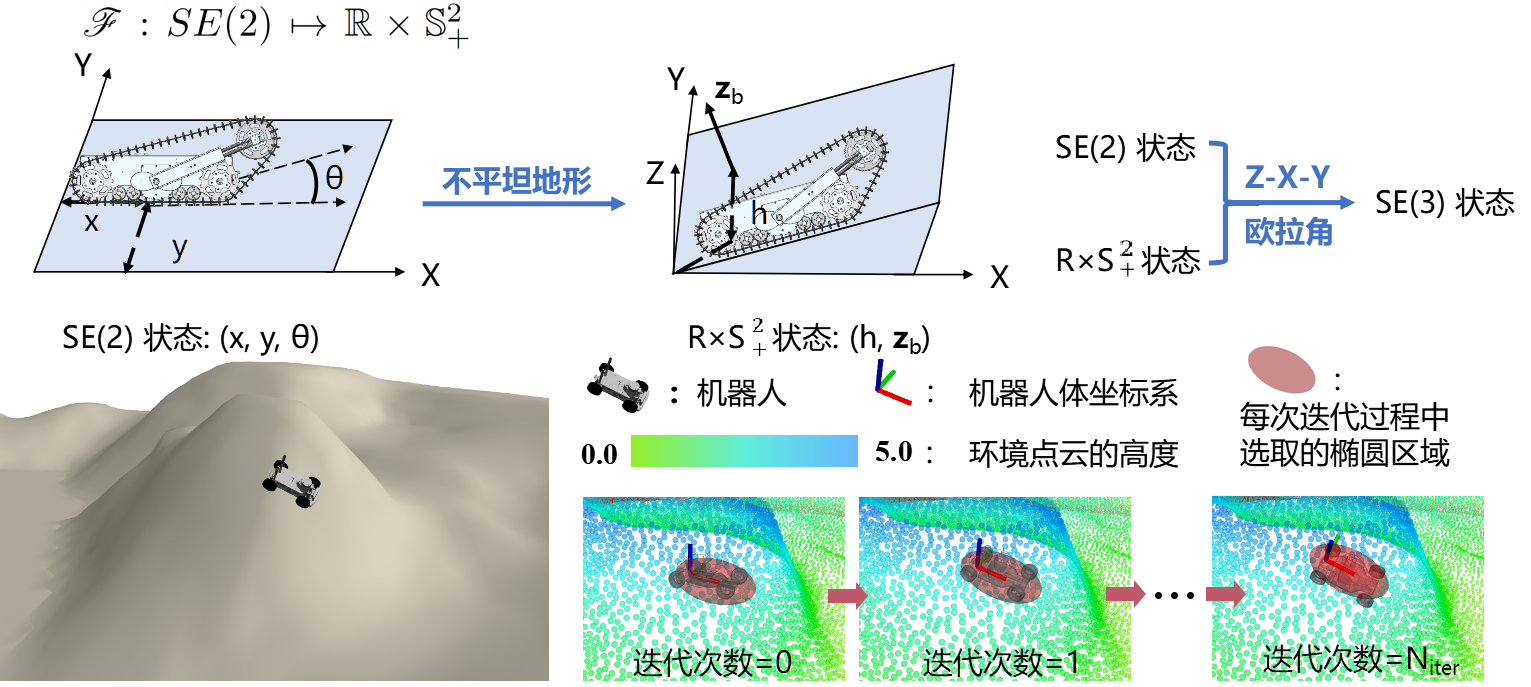
本项目通过扩展卡尔曼滤波(EKF)方法实现激光雷达点云数据与惯性测量单元(IMU)数据的高效融合,进而构建了精确的激光惯性里程计。每一帧激光点云的位姿被用于全局地图的构建,引入回环检测的技术,通过检测机器人经过相同或者相似的环境,确定机器人当前的位置并校正机器人之前所走过的轨迹,从而提高机器人定位精度和鲁棒性。针对点云数据量庞大导致的存储资源开销问题,采用了iKd-tree数据结构进行优化处理。相较于单一传感器系统,该多传感器融合方案能有效应对环境退化和动态障碍物。 在多离散巡检任务点路径规划方面,主要采用基于动态窗口法(DWA)的局部路径规划算法。该算法能针对车辆周围的多个潜在路径进行筛选和优化,进而确定最优且可行的路径。障碍物感知是基于车体坐标系下当前帧局部点云进行的,以实现精准的局部路径规划。 为实现跨楼层巡检任务,除预设固定点方式外,也支持直接为给定目标点生成全局路径。全局地图构建阶段首先进行点云地图的栅格化,然后计算其欧几里得距离场(ESDF),以确保路径规划满足安全性约束,避免意外情况如车辆翻倒或碰撞。路径搜索首先通过A*算法进行前端粗略路径生成,在后端则采用基于优化的规划框架,以在三维环境中生成平滑轨迹。这一系列先进技术和方法综合确保了巡检系统的高效性、准确性和可靠性。
家族化介绍
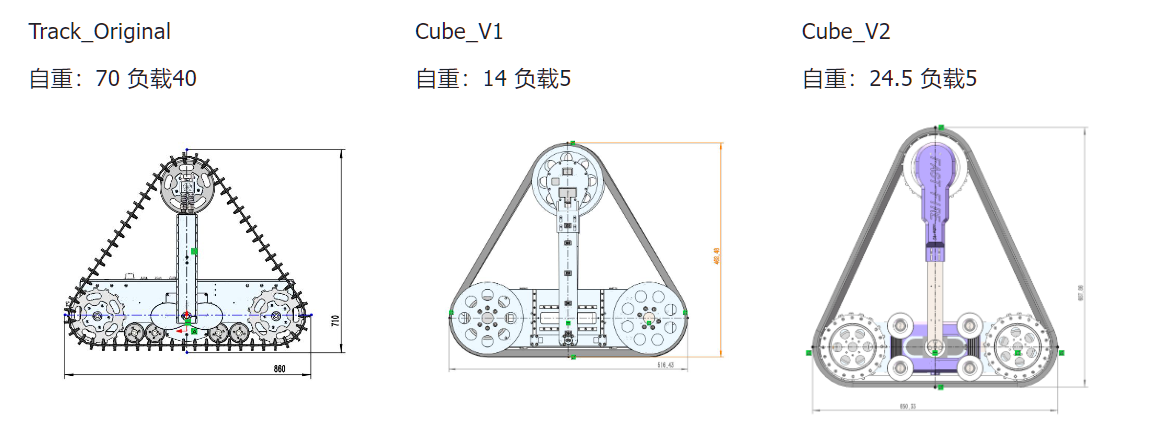
为适应不同地形,不同项目的要求,本团队还设计了多款尺寸的变形履带车,以供选择!