CSN-ZJUHI | FAST-FIRE
CSN-ZJUHI | FAST-FIRE
Spotlight
News
People
Research
Publications
Robots
Source Themes
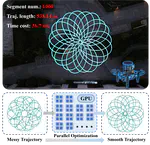
TOP: Trajectory Optimization via Parallel Optimization towards Constant Time Complexity
Optimization has been widely used to generate smooth trajectories for motion planning. However, existing trajectory optimization …
Jiajun Yu
,
Nanhe Chen
,
Guodong Liu
,
Chao Xu
,
Fei Gao
,
Yanjun Cao
PDF
Cite
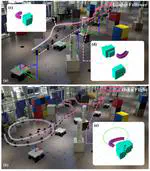
COVER: cross-vehicle transition framework for quadrotor control in air-ground cooperation
UAV transitions across UGVs enable diverse air-ground cooperation (AGC) applications,such as cross-vehicle landing, delivery, and …
Qiuyu Ren
,
Miao Xu
,
Mengke Zhang
,
Nanhe Chen
,
Mingwei Lai
,
Chao Xu
,
Fei Gao
,
Yanjun Cao
DOI
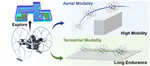
Autonomous Exploration with Terrestrial-Aerial Bimodal Vehicles
Terrestrial-aerial bimodal vehicles, which integrate the high mobility of aerial robots with the long endurance of ground robots, offer …
Yuman Gao
,
Ruibin Zhang
,
Tiancheng Lai
,
Yanjun Cao
,
Chao Xu
,
Fei Gao
PDF
Cite
DOI
Universal Trajectory Optimization Framework for Differential Drive Robot Class
Universal Trajectory Optimization Framework for Differential Drive Robot Class
Mengke Zhang
,
Nanhe Chen
,
Hu Wang
,
Jianxiong Qiu
,
Zhichao Han
,
Qiuyu Rem
,
Chao Xu
,
Fei Gao
,
Yanjun Cao
PDF
Cite
Code
Project
Video
DOI
Global-State-Free Obstacle Avoidance for Quadrotor Control in Air-Ground Cooperation
CoNi-MPC [Zhang et al. (2023)] provides an efficient framework for UAV control in air-ground cooperative tasks by relying exclusively …
Baozhe Zhang
,
Xinwei Chen
,
Qingcheng Chen
,
Giovanni Beltrame
,
Chao Xu
,
Fei Gao
,
Yanjun Cao
PDF
DOI
CoNi-MPC: Cooperative Non-inertial Frame Based Model Predictive Control
This work presents a novel solution for UAV control in cooperative multi-robot systems, which can be used in various scenarios such as …
Baozhe Zhang
,
Xinwei Chen
,
Zhehan Li
,
Giovanni Beltrame
,
Chao Xu
,
Fei Gao
,
Yanjun Cao
PDF
Code
Project
Video
DOI
Cost-Effective Swarm Navigation System via Close Cooperation
Multi-robot system is desired to achieve global cost-efficiency by fully utilizing individual advantages. For example, leveraging …
Nanhe Chen
,
Zhehan Li
,
Lun Quan
,
Xinwei Chen
,
Chao Xu
,
Fei Gao
,
Yanjun Cao
PDF
Video
DOI
Cite
×