Multi-Robot Systems
Research on the cooperation of multiple robots, towards swarms.

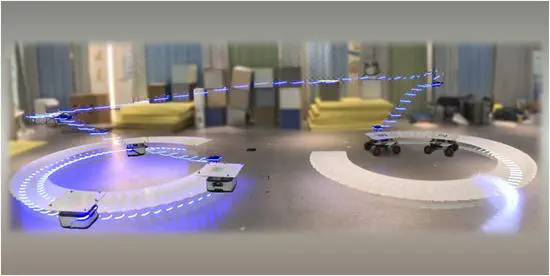
CoNi-MPC/OA
Cooperative Non-inertial Frame Based Model Predictive Control and Obstacle Avoidance
COVER
Cross-Vehicle Transition Framework for Quadrotor Control in Air-Ground Cooperation
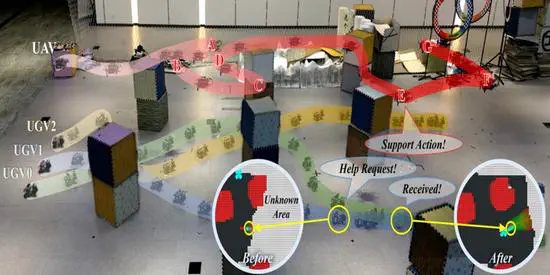
ColAG
Collaborative Air-Ground System to Boost Air-Gound Cooperation
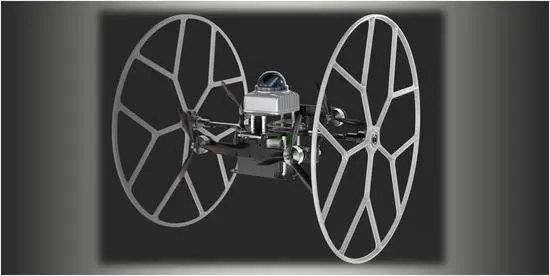
Novel Robot Platforms
Novel design and implementation of new robots targeting real-world challenges.


Autonomous Navigation
Localization, mapping, planning, and perception towards fully autonomous navigation.

Off-Road Navigation
Real-time Spatial-temporal Traversability Assessment via FSGP-BGK
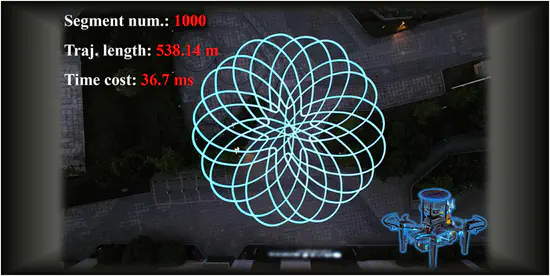
TOP
Trajectory Optimization via Parallel Optimization towards Constant Time Complexity
CREPES
CREPES provides accurate, robust, high-frequency 6DOF relative pose estimation
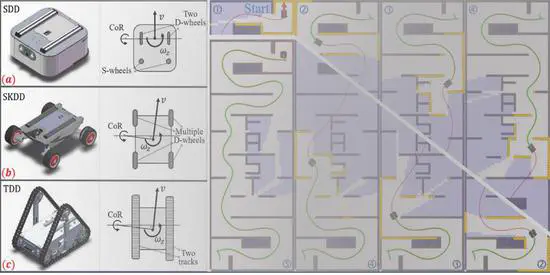
DDR-Planner
Universal Trajectory Optimization Framework for Differential Drive Robot Class