 Image credit: FAST-FIRE
Image credit: FAST-FIREAbstract
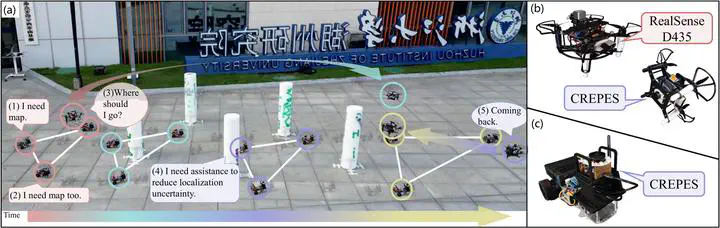
Multi-robot system is desired to achieve global cost-efficiency by fully utilizing individual advantages. For example, leveraging unmanned aerial vehicles’ (UAVs’) agility for inspection and ground vehicles’ (UGVs’) capability for heavy-duty tasks. Coordinating the motion of multiple robots smartly is complex and it becomes more challenging when robots in the swarm are not equipped with sufficient sensors for environmental perception (e.g. in our case only one robot has a depth camera). In this letter, we propose a tightly coupled systematic framework to navigate a swarm composed of UAV and UGVs in unknown scenes. The system has only one depth camera with a field of view for environmental perception. We fully explore the cooperation between robots by proposing a Sequential Exploration and Aiding Localization (SEAL) planning strategy for the UAV and a Collision-Adaptive Trajectory (CAT) optimization for UGVs. The UAV assists UGVs’ localization with relative pose estimation and own global localization, meanwhile, it focuses on exploration to provide UGVs with abundant environmental information. The UGV team can navigate safely and autonomously in obstacle-rich environments and even maintain formations with only the wheel odometer and UAV’s assistance using CAT optimization. Our method is validated both in simulations and real-world experiments indoors and outdoors.
Zhehan Li
Ph.D. student
My research interests include multi-robot perception, multi-robot collaboration, and multi-robot reinforcement learning.
Xinwei Chen
Researcher
My research interests focus on key challenges in motion control and planning, especially under both inertial and non-inertial reference frames.
Yanjun Cao
Principal Investigator
My research interests focuse on key challenges in multi-robot systems, such as collaborative localization, perception, communication, and system organization.