EAR-SLAM: Environment-aware robust localization system for terrestrial-aerial bimodal vehicles
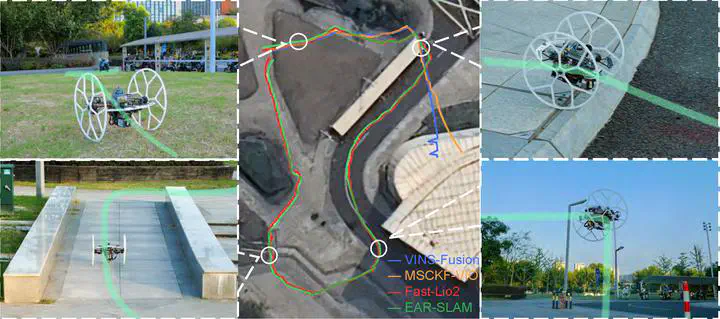 Image credit: EAR-SLAM
Image credit: EAR-SLAMAbstract
Terrestrial-aerial bimodal vehicles (TABVs) can fly to avoid obstacles and move safely on the ground to save energy, offering enhanced adaptability and flexibility in various challenging environments. However, a robust localization approach becomes a bottleneck to stably applying the TABVs in real-world tasks. Besides the general limitations of visual SLAM methods, large FoV differences between the two modes, abrupt motion strikes in mode transitions, and unstable attitude in ground mode pose great challenges. In this paper, we present an environment-aware robust localization system specifically designed for passive-wheel-based TABVs, which feature two passive wheels alongside a standard quadrotor. The localization system tightly integrates data from multiple sensors, including a stereo camera, Inertial Measurement Units (IMUs), encoders, and single-point laser distance sensors. First, we introduce a terrain-aware odometer model that accurately estimates terrain slope and vehicle’s velocity. Then, we propose an anomaly-aware method that senses anomalous sensors and dynamically adjusts the optimization weights accordingly. By explicitly estimating the environmental conditions, such as ground terrain slopes and visual information qualities, the robot can achieve accurate and robust localization results on the ground. To validate our localization approach, we conducted extensive experiments across various challenging scenarios, demonstrating the effectiveness and reliability of our system for real-world applications.