CSN-ZJUHI | FAST-FIRE
CSN-ZJUHI | FAST-FIRE
Spotlight
News
People
Research
Publications
Robots
Article-Journal
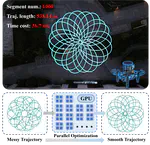
TOP: Trajectory Optimization via Parallel Optimization towards Constant Time Complexity
Optimization has been widely used to generate smooth trajectories for motion planning. However, existing trajectory optimization …
Jiajun Yu
,
Nanhe Chen
,
Guodong Liu
,
Chao Xu
,
Fei Gao
,
Yanjun Cao
PDF
Cite
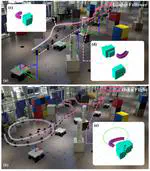
COVER: cross-vehicle transition framework for quadrotor control in air-ground cooperation
UAV transitions across UGVs enable diverse air-ground cooperation (AGC) applications,such as cross-vehicle landing, delivery, and …
Qiuyu Ren
,
Miao Xu
,
Mengke Zhang
,
Nanhe Chen
,
Mingwei Lai
,
Chao Xu
,
Fei Gao
,
Yanjun Cao
DOI
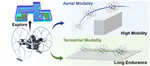
Autonomous Exploration with Terrestrial-Aerial Bimodal Vehicles
Terrestrial-aerial bimodal vehicles, which integrate the high mobility of aerial robots with the long endurance of ground robots, offer …
Yuman Gao
,
Ruibin Zhang
,
Tiancheng Lai
,
Yanjun Cao
,
Chao Xu
,
Fei Gao
PDF
Cite
DOI
Universal Trajectory Optimization Framework for Differential Drive Robot Class
Universal Trajectory Optimization Framework for Differential Drive Robot Class
Mengke Zhang
,
Nanhe Chen
,
Hu Wang
,
Jianxiong Qiu
,
Zhichao Han
,
Qiuyu Rem
,
Chao Xu
,
Fei Gao
,
Yanjun Cao
PDF
Cite
Code
Project
Video
DOI
Global-State-Free Obstacle Avoidance for Quadrotor Control in Air-Ground Cooperation
CoNi-MPC [Zhang et al. (2023)] provides an efficient framework for UAV control in air-ground cooperative tasks by relying exclusively …
Baozhe Zhang
,
Xinwei Chen
,
Qingcheng Chen
,
Giovanni Beltrame
,
Chao Xu
,
Fei Gao
,
Yanjun Cao
PDF
DOI
CoNi-MPC: Cooperative Non-inertial Frame Based Model Predictive Control
This work presents a novel solution for UAV control in cooperative multi-robot systems, which can be used in various scenarios such as …
Baozhe Zhang
,
Xinwei Chen
,
Zhehan Li
,
Giovanni Beltrame
,
Chao Xu
,
Fei Gao
,
Yanjun Cao
PDF
Code
Project
Video
DOI
Cost-Effective Swarm Navigation System via Close Cooperation
Multi-robot system is desired to achieve global cost-efficiency by fully utilizing individual advantages. For example, leveraging …
Nanhe Chen
,
Zhehan Li
,
Lun Quan
,
Xinwei Chen
,
Chao Xu
,
Fei Gao
,
Yanjun Cao
PDF
Video
DOI
An Improved Four-Pin Gripper for Robust 2.5-D Form-Closure Grasp
The four-pin gripper is an ideal end-effector to achieve form-closure grasps, which is especially useful in scenarios where a stable …
Rui Li
,
Yanjun Cao
,
Zhenshan Bing
,
Hong Qiao
PDF
DOI
Certifiably Optimal Mutual Localization With Anonymous Bearing Measurements
Mutual localization is essential for coordination and cooperation in multi-robot systems. Previous works have tackled this problem by …
Yingjian Wang
,
Xiangyong Wen
,
Longji Yin
,
Chao Xu
,
Yanjun Cao
,
Fei Gao
PDF
DOI
Swarm of micro flying robots in the wild
Aerial robots are widely deployed, but highly cluttered environments such as dense forests remain inaccessible to drones and even more …
Xin Zhou
,
Xiangyong Wen
,
Zhepei Wang
,
Yuman Gao
,
Haojia Li
,
Qianhao Wang
,
Tiankai Yang
,
Haojian Lu
,
Yanjun Cao
,
Chao Xu
,
Fei Gao
PDF
DOI
»
Cite
×