基于非惯性系的旋翼无人机模型预测控制框架
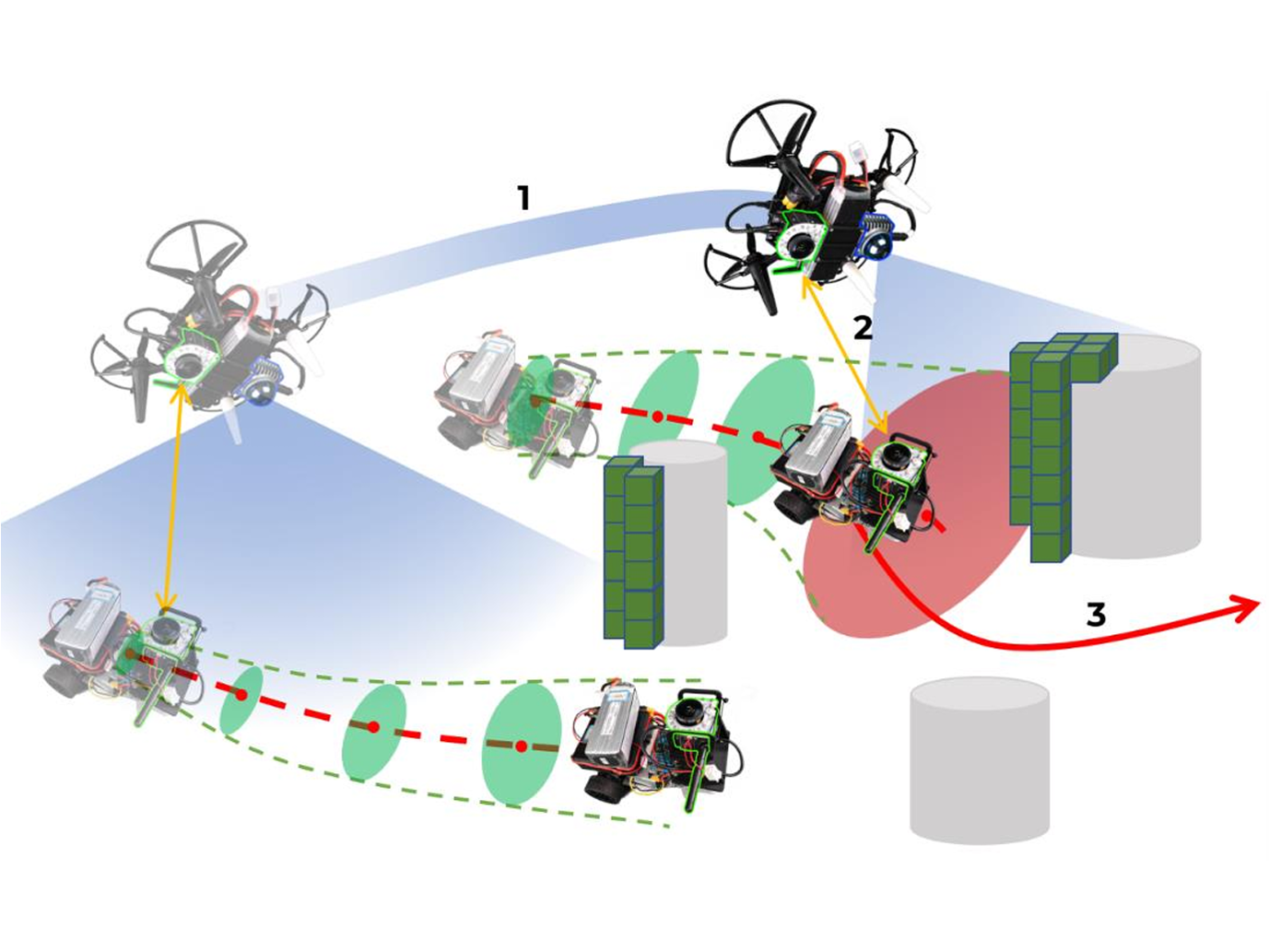
基于空中机器人自主协助的地面盲车集群导航框架
RoFly (优飞)空地双模移动机器人,能滚能飞、卫星拒止、持久续航。
CubeTrack (酷行)变形履带机器人,灵巧机身,强大越障。
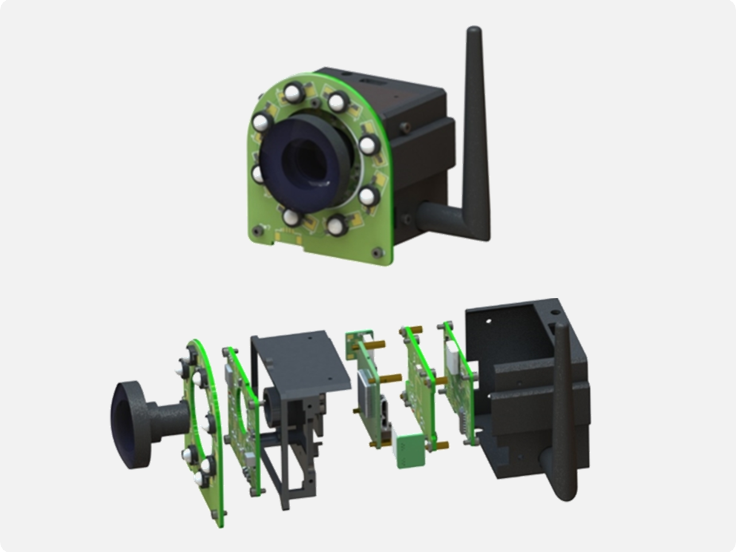
基于多传感器融合的6自由度相对位姿估计系统